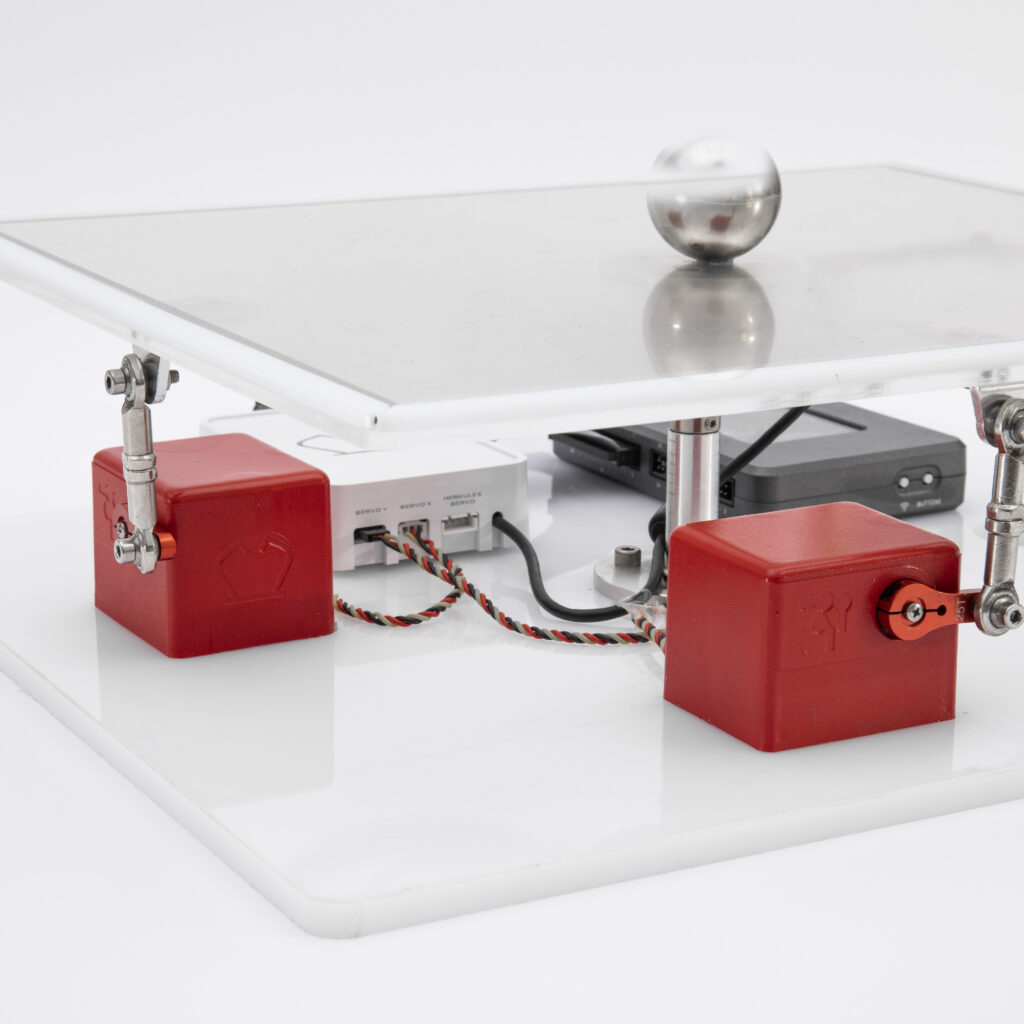
An innovative experiment for exploring sphere movement and positioning on a table. Ideal for simple or advanced exercises in control and mechatronics education.
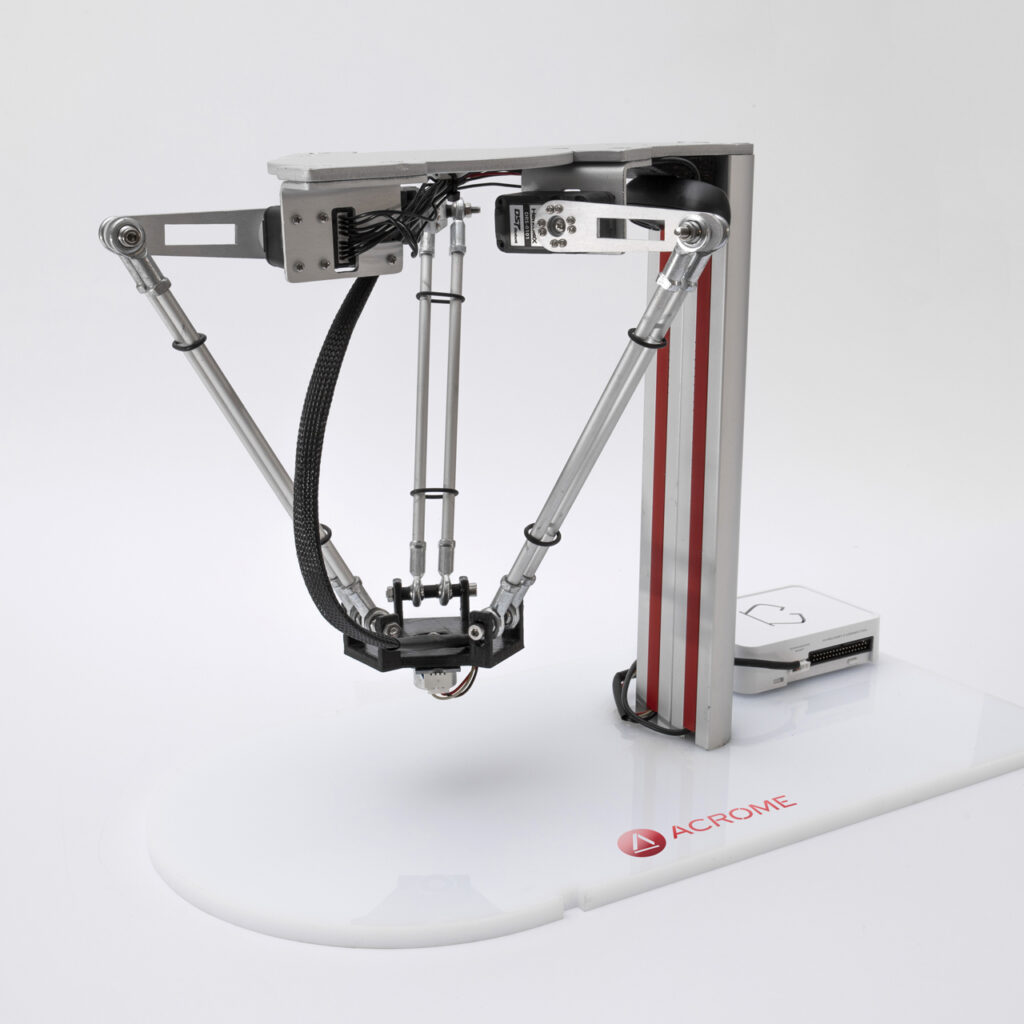
An excellent platform for teaching the fundamentals of robotics with parallel kinematics.This 3-DoF, vision-guided robotic system is suitable for both educational and research applications.
Designed for advanced robotics concepts in academia and research, this parallel manipulator features high-sensitivity actuators, a gyroscope, and a 3-axis accelerometer. With customizable options for size, payload, and software, it supports a wide range of simulations, including crane systems, machine tools, drones, and precision positioning platforms such as telescopes and antennas.